INRIA Pedestrian Detector
Below is a MATLAB/C++ implementation of a pedestrian detector trained on the INRIA Person dataset. Features are based on pyramid HOG features and classification is done using the piecewise linear approximation as described in the paper below:
Classification Using Intersection Kernel Support Vector Machines is efficient.Subhransu Maji and Alexander C. Berg and Jitendra Malik.
In Proceedings, CVPR 2008, Anchorage, Alaska
- Final Pedestrian Detector
ped_detector_RELEASE.tar.gz
- code is written in MATLAB/C
- PHOG features + IKSVM classification using piecewise linear approximation.
- returns non-max supressed bounding boxes.
- takes about 6-7 seconds on a typical 400x600 image for 10,000 scanning windows. 90% of the time is spent on feature computation.
- INRIA Person dataset benchmarking
code inria-benchmark-RELEASE.tar.gz
Testing is done using the PASCAL criterion which counts a detection to be correct if the overlap (intersection over union) of the detected and groundtruth bounding box is greater than 0.5. We run the detector on the INRIA Test images (both positive and negative). The detection plots are shown below.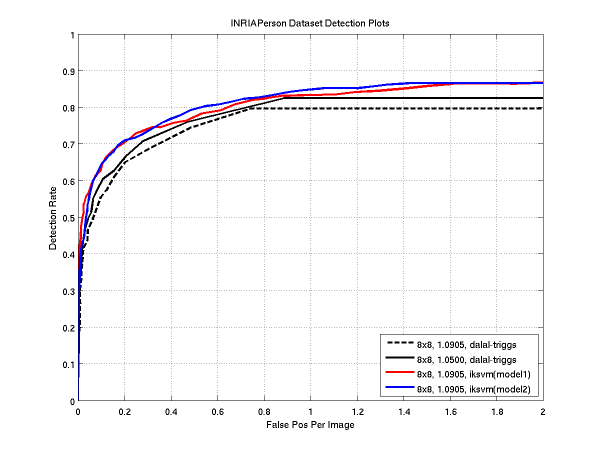
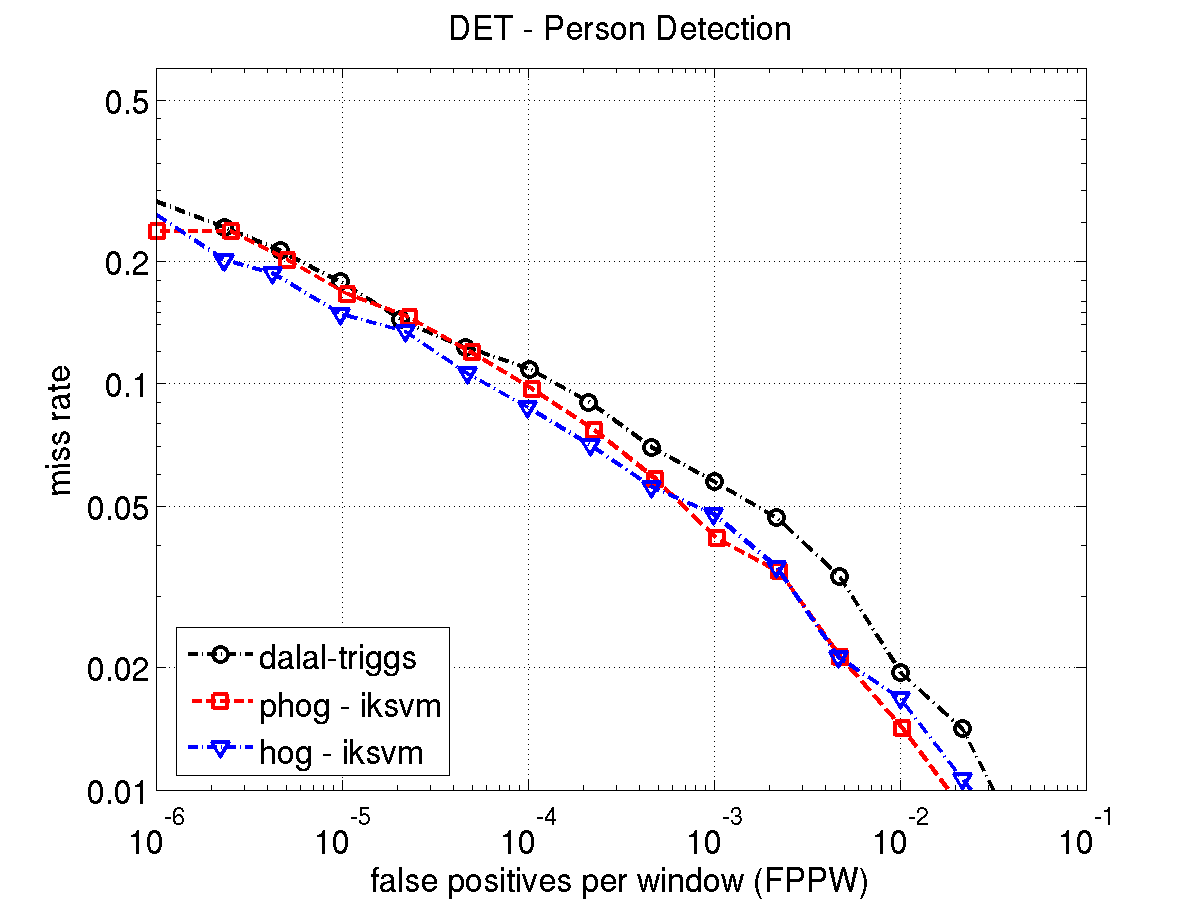
- Benchmarking on precropped positive images can lead to overfitting
because of boundary artifacts. We found that our previous curves on
recall vs. false positives per window were artificially improved
because of this. The new curves are shown below