Distribution Fields for Tracking
Abstract:
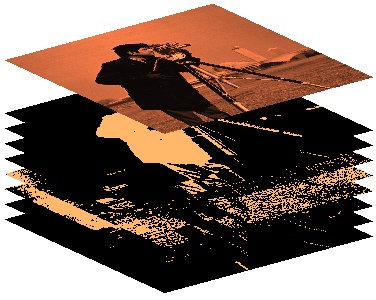
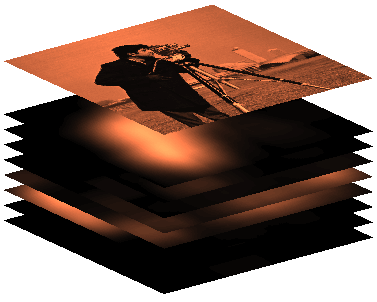
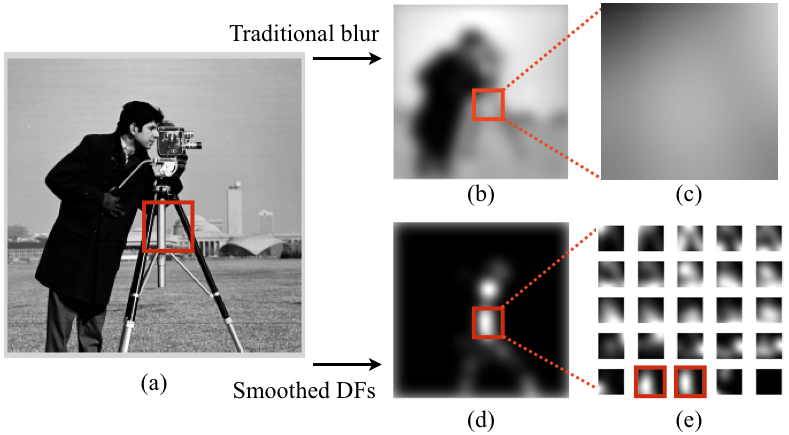
Visual tracking of general objects often relies on the assumption that gradient descent of the alignment function will reach the global optimum. A common technique to smooth the objective function is to blur the image. However, blurring the image destroys image information, which can cause the target to be lost. To address this problem we introduce a method for building an image descriptor using distribution fields (DFs), a representation that allows smoothing the objective function without destroying information about pixel values. We present experimental evidence on the superiority of the width of the basin of attraction around the global optimum of DFs over other descriptors. DFs also allow the representation of uncertainty about the tracked object. This helps in disregarding outliers during tracking (like occlusions or small misalignments) without modeling them explicitly. Finally, this provides a convenient way to aggregate the observations of the object through time and maintain an updated model. We present a simple tracking algorithm that uses DFs and obtains state-of-the-art results on standard benchmarks.
Paper:
Laura Sevilla-Lara and Erik Learned-Miller.
Distribution Fields for Tracking
IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2012.
[pdf]
MATLAB code:
We made our [MATLAB code] publicly available. If you use it, please cite us.
Videos with Results:
Tiger1